产品介绍
产品介绍产品参数
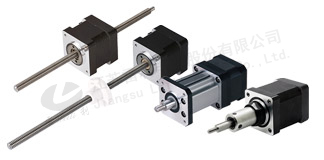
混合式步进电机是综合了永磁式和反应式的优点而设计的步进电机。它又分为两相、三相和五相,两相步进角一般为1.8度,三相步进角一般为1.2度,而五相步进角一般为0.72度。

混合式步进电机的转子本身具有磁性,因此在同样的定子电流下产生的转矩要大于反应式步进电机,且其步距角通常也较小,因此,经济型数控机床一般需用混合式步进电机驱动。但混合转子的结构较复杂、转子惯量大,其快速性要低于反应式步进电机。
混合式步进电机的结构与反应式步进电机不同,反应式步进电机的定子与转子均为一体结构,而混合式电机的定子与转子都被分为下图所示的两段,极面上同样都分布有小齿。
定子的两段齿槽不错位,上面布置有绕组。上所示为两相4对极电机,其中的l、3、5、7为A相绕组磁极,2、4、6、8为B相绕组磁极。每相的相邻磁极绕组绕向相反,以产生上图中x、y向视图中所示的闭合磁路。
B相与A相的情况类似。转子的两段齿槽相互错开半个齿距(见图5.1.5),中间用环形永久磁钢连接,两段转子的齿的磁极相反。根据反应式电机同样的原理,电机只要按照A—B—A—B—A或A—B—A—B—A的顺序通电,步进电机就能逆时针或顺时针连续旋转。
显然,同一段转子片上的所有齿都具有相同极性,而两块不同段的转子片的极性相反。混合式步进电机与反应式步进电机的最大区别在于当磁化的永久磁性材料退磁后,则会有振荡点和失步区。
混合式步进电机的转子本身具有磁性,因此在同样的定子电流下产生的转矩要大于反应式步进电机,且其步距角通常也较小,因此,经济型数控机床一般需要用混合式步进电机驱动。但混合转子的结构较复杂、转子惯量大,其快速性要低于反应式步进电机。